أصبحت الروبوتات مجالًا شائعًا بشكل متزايد في السنوات الأخيرة ، ولسبب وجيه. تمتلك الروبوتات القدرة على إحداث ثورة في طريقة عيشنا وعملنا وتفاعلنا مع العالم من حولنا. أحد أفضل الأشياء في مجال الروبوتات هو أنه يمكن لأي شخص المشاركة والبدء في بناء الروبوتات ، بغض النظر عن مستوى خبرته التقنية. بمساعدة Raspberry Pi ولغة البرمجة Python ، يمكنك بسهولة بناء روبوتات وإحياء أفكارك. في هذه المقالة ، سنناقش كيفية بناء روبوتات باستخدام Raspberry Pi كعقل والتحكم بها باستخدام لغة البرمجة Python.
الوقت اللازم: 4 ساعات
- الخطوة 1: جمع المكونات
لبناء روبوت باستخدام Raspberry Pi ، ستحتاج إلى المكونات التالية:المحركات (مثل DC motors, stepper motors)
جهاز تكم بالمحرك (على سبيل المثال ، L298N)
الهيكل
عجلات أو مسارات
مزود الطاقة لـ Raspberry Pi والمحركات
بطاقة SD مع تثبيت نظام التشغيل Raspberry Pi
اختياري: حافظة لجهاز Raspberry Pi - الخطوة 2: قم بتجميع الهيكل
بمجرد حصولك على جميع المكونات ، فإن الخطوة التالية هي تجميع الهيكل. يمكنك استخدام هيكل معد مسبقًا أو إنشاء هيكل خاص بك باستخدام مواد مثل الورق المقوى أو البلاستيك أو المعدن. الشيء المهم هو أن الهيكل يوفر قاعدة متينة لـ Raspberry Pi والمحركات.
- الخطوة 3: قم بتوصيل المحركات والمتحكم بالمحرك
بعد ذلك ، ستحتاج إلى توصيل المحركات والمتحكم بـ Raspberry Pi. يستخدم المتحكم المحرك للتحكم في سرعة واتجاه المحركات. ستختلف طريقة الاتصال المحددة اعتمادًا على نوع محرك المحرك الذي تستخدمه ، ولكن يمكن توصيل معظم برامج تشغيل المحركات بـ Raspberry Pi باستخدام دبابيس GPIO.
- الخطوة 4: قم بتثبيت البرنامج المطلوب
بمجرد توصيل المحركات ومحرك المحرك بـ Raspberry Pi ، ستحتاج إلى تثبيت حزم البرامج المطلوبة. حزمة البرامج التالية مطلوبة:
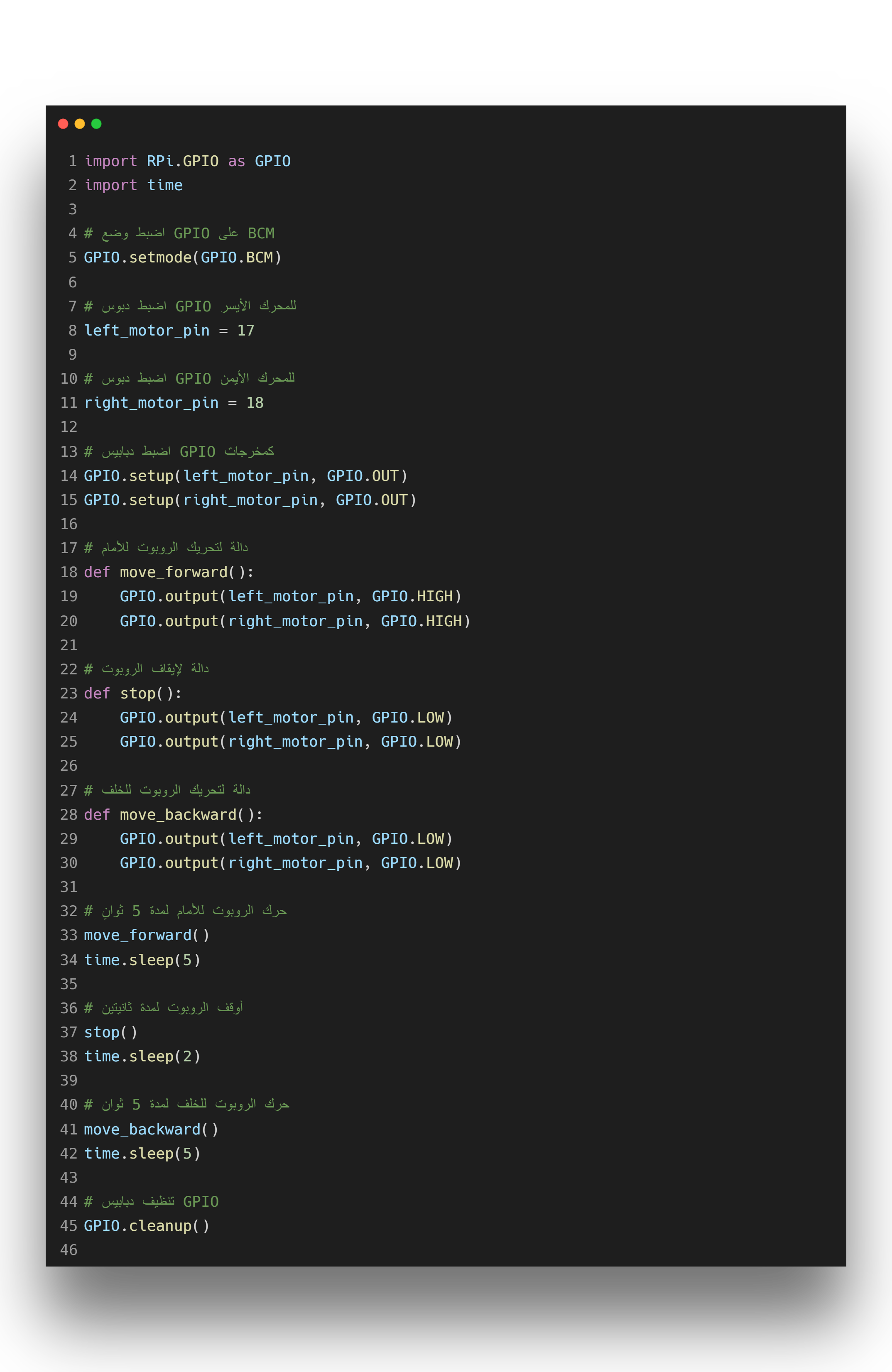
RPi.GPIO: مكتبة Python للتحكم في دبابيس GPIO على Raspberry Pi - الخطوة 5: اكتب التعليمات البرمجية باستخدام بايثون
بعد تثبيت حزم البرامج المطلوبة ، ستحتاج إلى كتابة برنامج نصي بلغة Python يمكنه التحكم في المحركات وتحريك الروبوت. سيستخدم البرنامج النصي مكتبة RPi.GPIO للتحكم في دبابيس GPIO على Raspberry Pi ، وسيستخدم محرك المحرك للتحكم في سرعة واتجاه المحركات.
- الخطوة 6: الاختبار والتحسين
أخيرًا ، يمكنك اختبار الروبوت وتنقيح نص Python حسب الحاجة. قد تحتاج إلى ضبط سرعة واتجاه المحركات ، أو إضافة وظائف إضافية ، مثل أجهزة الاستشعار أو الكاميرات ، إلى الروبوت.
مثال:
إليك مثال على كيفية بناء روبوت بسيط باستخدام Raspberry Pi وبرمجة Python:
اجمع المكونات ، بما في ذلك Raspberry Pi والمحركات وسائق المحرك (على سبيل المثال ، L298N) والهيكل والعجلات أو المسارات ومصدر الطاقة.
قم بتجميع الهيكل باستخدام مواد مثل الورق المقوى أو البلاستيك أو المعدن.
قم بتوصيل المحركات وسائق المحرك بـ Raspberry Pi.
قم بتثبيت حزمة برامج RPi.GPIO.
اكتب نصًا بلغة Python يمكنه التحكم في المحركات وتحريك الروبوت.
اختبر الروبوت وصقل التعليمات البرمجة في Python حسب الحاجة.
في الختام ، يعد بناء الروبوتات باستخدام Raspberry Pi وبرمجة Python مشروعًا ممتعًا وتعليميًا يمكن أن يساعدك على فهم أساسيات الروبوتات والبرمجة.